分子锚定技术,实现高保真肌电图增强假肢控制!
肌电信号是肌肉收缩过程中产生的电动作电位。这些信号包含大脑发出的神经信息,以控制特定的运动,使其可用作截肢者控制假肢的输入源,截肢者接受过产生这些信号的培训。记录肌电信号是通过放置在残肢皮肤上的无创电极实现的。然而,这些信号是高度可变的,通常归一化为肌肉的最大自愿收缩(MVC)。对于精细和灵活的动作,如手指和手腕动作,肌肉收缩低于10%MVC。挑战在于,这些动作产生的肌电信号经常失真,信噪比低,因为传统电极不能有效地与截肢者的皮肤耦合。因此,截肢者经常被迫使用更强的肌肉收缩(高于10%的MVC),以触发对微弱但精细的手指运动的信号识别。截肢者肌肉收缩和假体运动之间的这种不匹配会导致不适、过度出汗、皮肤刺激,最终导致假体排斥。
在此, 新加坡南洋理工大学陈晓东等人开发了一种称为分子锚定的新策略,以驱动疏水分子有效地与角质层相互作用并嵌入到角质层中,因为离子通量和电子电流之间存在高度耦合的区域。疏水性聚(N-乙烯基己内酰胺)凝胶(PVCL)的使用使界面阻抗达到20kΩ,是商用丙烯酸酯电极的1/100,可以检测到接近人类极限的超低肌电信号(~1.5%MVC)。有了这种分子锚定技术,截肢者可以更灵活地操作假肢,因为幻影手指和手腕运动的预测准确率为97.6%。这一策略为截肢者通过精确而灵活的肌电控制完成日常任务提供了舒适的人机界面。该研究以题为“Enhancing Prosthetic Control through High-Fidelity Myoelectric Mapping with Molecular Anchoring Technology”的论文发表在《Advanced Materials》上。
【分子动力学模拟】首先进行了分子动力学(MD)模拟,以了解PVCL分子如何与SC相互作用并锚定到SC中。以脂基质为模型,SC是由游离脂肪酸(FFA)、长链神经酰胺(CER)和胆固醇(CHOL)按固定比例混合而成的。计算的势均力(PMF)证实了脂基质的固有疏水性,表明更疏水的单体有更低的能垒(∆G)锚定到SC中,并且更容易嵌入。因此,该研究检测了其他4种粘合剂分子:聚乙烯吡咯烷酮(PVP)、丙烯酸、多巴胺(DOPA)和海藻酸盐,以解释分子锚定。在5种单体中,PVCL的疏水性最强,∆G最低(6.57KBT),最能锚定到脂质基质中。

图1.凝胶电极与角质层相互作用的分子动力学模拟
PVCL锚定在由丝素制成的仿生皮肤(仿生皮肤的分子结构与真实角质层相同)3.07μm,比PVP(2.43μm)、丙烯酸(1.18μm)、多巴(0.97μm)和海藻酸盐(0μm)更深。在5种单体中,疏水性最强的PVCL单体与皮肤的结合效果最好。
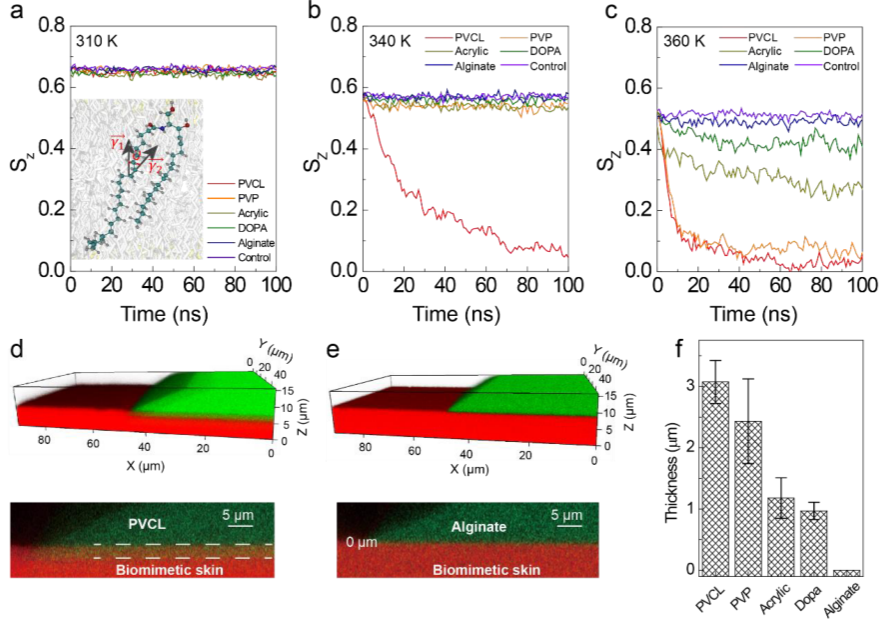
图2.五种凝胶向仿生皮肤的动态渗透过程
【PVCL电极的力学和电学性能】使用这些单体制造了五个凝胶电极,并评估了它们的机械和电学性能。在180°剥离试验中,PVCL凝胶仍然优于其他凝胶。在1Hz时,5个电极的内阻抗均为200~300Ω,而在1Hz时,正常皮肤(~14kΩ)和截肢者(~20kΩ)的内阻抗最低。这些值比以前的电极更接近人体皮肤的固有阻抗(6-10kΩ),可以检测到接近人体极限(~1%MVC)的低水平(1.5%MVC)肌电信号。这表明,将PVCL锚定到SC中改善了离子-电子耦合,并显著降低了皮肤上的阻抗。具有检测用于精细假肢控制的超低肌电信号的潜力。
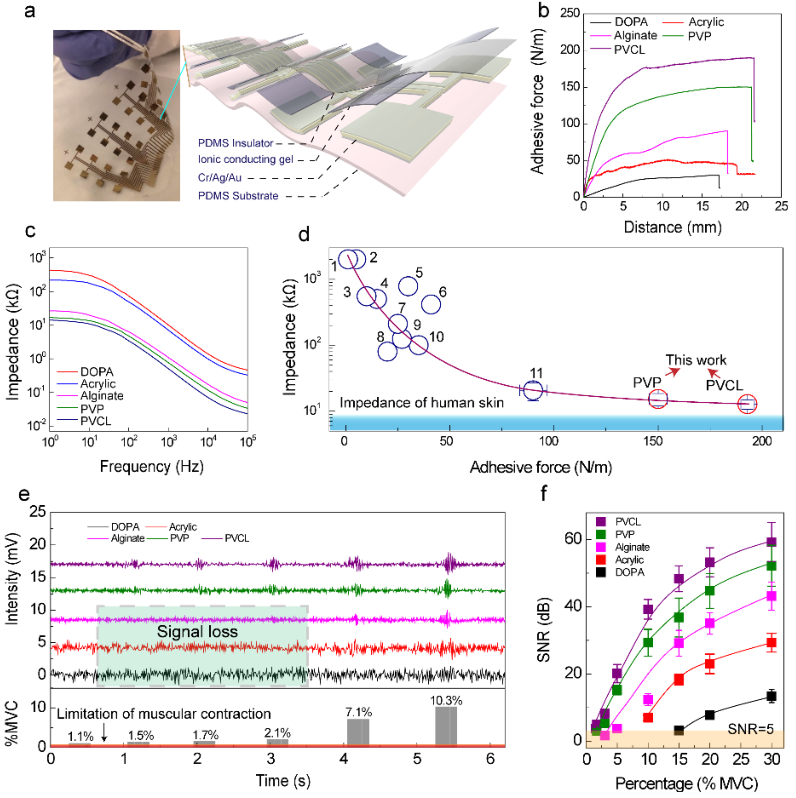
图3.五种凝胶电极的电性能
【灵巧的肌电控制】此外,建立了基于PVCL的凝胶电极阵列,并用它们来测量截肢者残肢的低水平肌电信号。电极通过柔性电缆连接到无线数据记录盒,测量的肌电信号用于控制假肢,在这项工作中,假臂由机器人汽车代表。为了使用卷积神经网络(CNN)进行图像识别,通过1×n×m像素映射将肌电信号转换为图像,其中n是电极阵列上的通道数,m是记录预期手指和手腕运动的每次肌肉收缩所需的时间(m是200ms)。在所有5个电极中,PVCL电极对低电平信号的CNN识别准确率最高(97.6%),使机械臂能够成功地抓住蜡烛并将其放入孔中。在22.5s到36.4s之间,机器人汽车使用了超低水平和高质量的肌电映射来灵巧地接近小孔。为了让机械臂抓住蜡烛,截肢肢体产生的预定动作的肌肉收缩的强度必须与正常手指运动的强度相匹配。如果不匹配,就不会发生抓取。该结果表明,牢固地固定在皮肤中的PVCL电极可以检测到适合于基于CNN的识别和精细假肢控制的低电平肌电信号。
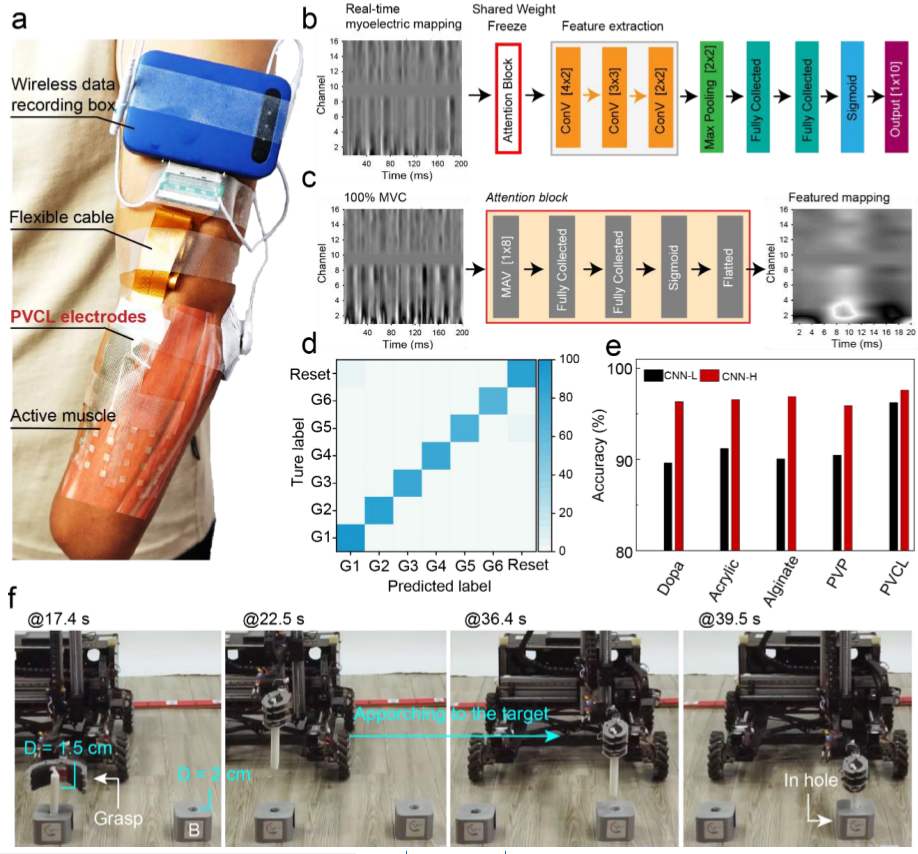
图4.灵巧的肌电控制
【小结】该研究提出了一种通过开发锚定在SC中的PVCL凝胶电极来提高低水平肌电信号的检测和保真度的策略。这种牢固的锚定增强了离子电子耦合,并将截肢皮肤上的阻抗降至最低(最低可达20kΩ)。该研究的电极的整体机械和电学性能超过其他凝胶电极,可以检测到接近人类极限的超低(1.5%MVC)肌电信号。设计了一种基于CNN的映射识别算法,该算法可以从使用PVCL电极获得的肌电信号中分类和预测预期的手指和手腕运动,准确率为97.6%。有了如此高保真的信号和分类精度,该系统使截肢者能够灵活地驱动假肢。这种精细的运动有望改善依赖假肢完成日常任务的截肢者的生活质量。
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/adma.202301290
