动作控制中的肌肉协同理论
人体运动是基于任务和环境而产生的,在固定的环境中,个体基于对自身的感知及认知产生动作以满足任务的需要。
动作的产生既受制于个体、任务和环境的相互制约,又依赖于中枢神经系统的控制。人体在运动时,由神经系统控制各关节的运动,需要协调各骨骼肌产生肌肉力带动关节运动,这是一个复杂的过程,只有中枢神经系统发出准确的控制信息,人体才能作出合适的选择,并及时调整运动过程,从而做出准确的运动响应。
中枢神经系统如何组织协调多肌肉、多关节以产生功能性运动,环境和个体的感觉信息如何反馈到神经系统中并应用于运动的选择和控制,是运动控制的研究目标。
NO1. 肌肉协同理论
肌肉协同理论描述了脊椎动物肢体运动的一种潜在的神经肌肉控制机制,即神经并不单独控制某一块肌肉,而是在脊髓层上募集多个肌肉形成肌肉协同,处于同一肌肉协同中的肌肉被同时激活。肌肉协同被认为是中枢神经系统中运动控制的最小单位。
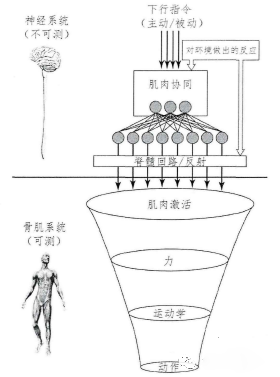
由于神经系统的行为是难以测得的,而骨肌(骨骼-骨骼肌)系统的行为是可测的,由骨肌系统行为可表征神经系统行为,肌肉协同理论为由骨肌系统的行为解释神经系统的控制提供了可能性。
神经系统对于骨肌系统的下行指令即表现在肌肉协同上,通过脊髓回路或反射反映在肌肉激活上,从而在骨肌系统中形成了力的作用,带动骨肌系统运动,产生特定的动作。
人体运动的产生来源于中枢神经系统和周围神经系统突触发出的指令,最终汇集到α运动神经元池中,受运动神经元支配的肌肉被募集,肌肉之间相互协调活动在骨骼系统中产生力,并与环境之间相互作用。
NO2. 骨骼肌的力学特性
骨骼肌是一种很特殊的人体结构,因为它能将神经系统的电信号转化为“力”,并引起骨骼系统的运动。根据肌丝滑行学说,力产生的原因在于收缩肌动蛋白和肌球蛋白分别存在于细肌丝和粗肌丝中,肌肉力的产生由神经信号引起,肌球蛋白分子头部的横桥以肌球蛋白表面的固定点为中心弧形转动,同时横桥与肌动蛋白的位点结合带动向肌节中心运动,当肌纤维中的全部肌节以“全或无”的方式同时缩短时,肌肉即完成一次收缩。
然而,当接收到神经信号时,肌肉的反应可缩短,可伸长,或者保持不变的长度,这取决于作用在骨骼肌的内力和外力。实验表明,在任何负载条件下,当受到神经信号时,肌肉都会产生力。对于一个给定水平的神经输入,肌组织可以产生大小不同的力,肌肉力取决于肌肉激活度、收缩元的力-长度特性和力-速度特性、并联弹性元的力-长度特性(Hill肌肉函数模型)由收缩元(Contractile Component,CC,对应的生理结构由肌肉构成)、串联弹性元(Series Elastic Component,SEC,对应的生理结构由肌腱构成)和并联弹性元(Paralle Elastic Component,PEC,对应的生理结构由肌束膜、肌肉膜、肌外膜和肌纤维膜构成)三元素组成。
肌肉-肌腱驱动器包括一条长度为Lr的肌腱,一条长度为Lm的肌纤维,α为肌纤维角,是肌腱和肌肉纤维束之间的夹角。

NO3. 动作控制激活
根据肌肉协同理论,潜在的神经肌肉控制层以各肌肉权重常数值的形式存储在脊髓层,为肌肉协同结构,而跟随时间变化的激活控制信号则需要根据运动进行调节,为肌肉协同激活系数,各肌肉协同结构与各肌肉协同激活系数进行线性组合可得各肌肉激活度,并产生一系列的肢体运动。
所以,肌肉协同理论提供了由骨肌系统的行为解释:神经系统控制的思想,通过肌肉协同结构矩阵和激活系数矩阵的线性组合,可以表示肌肉协同对于肌肉激活度的控制。

NO4. 肌肉协同假说
肌肉协同假说认为,神经中枢通过控制远少于全身肌肉数量的肌肉协同,实现对全身肌肉的控制;肌肉协同和肌肉的数量对应关系是多对多;不同的肌肉激活组合以矢量的方式相互配合,共同作用完成动作任务。肌肉协同被认为是神经系统直接控制的末端,是联系神经系统和肌肉系统的重要枢纽。神经系统以这种运行机制来实现对肌肉系统的控制。肌肉协同的神经结构基础位于大脑运动皮层、脊髓中枢模式发生器,并且不是生来就有,而需要经历一个从无到有逐渐发育成熟的过程。
肌肉协同既接受整个神经系统的指令控制,又是一种肌肉系统内部的协调方式。也可以说,肌肉协同本身就是神经控制的一部分,是复杂肢体动作的基础模块。从神经控制到肢体动作,肌肉协同如同一座桥梁,将二者紧密地关联到一起,是从“控制端”到“运动端”的重要中继。
NO5. 肌肉协同研究的基本方法
肌肉协同信息提取于肌电信号。肌电采集具有简便易行、信息量大和即时性好等特点。肌肉协同信息被转化为矩阵或其他特定数据形式,再通过分析这些数据结构获取神经-肌肉控制信息。采集对象可以选取单个动作、若干动作或连续动作构成的数据流,处理方式也比较灵活。提取处理方法包括独立成分分析、因子分析和非负矩阵分解等。

在运动仿真领域实际操作中,常通过肌肉的函数模型描述肌肉的力学特性,使肌肉驱动器按照此规则,实现对骨肌系统的正向动力学驱动。
在MATLAB(运动仿真软件平台)中实现肌肉模型的构建,与骨肌仿真模型结合构建骨肌系统;最后分析肌肉协同的原理,由肌肉协同结构矩阵和激活系数矩阵定义,最后根据两矩阵线性组合来表示对肌肉激活度与动作的控制。
如果您对表面肌电方面研究感兴趣,请与我们联系!
声明:文章仅用于学术交流,不用于商业行为,若有侵权及疑问,请后台留言,管理员即时删侵!
